
Передача Sampled Values: «точка-точка» или «шина процесса»?
Шину процесса всегда называют шиной. Наверно, можно смело утверждать, что прошло уже время, когда под «шиной» понимали некие мифические сервера и ещё Бог знает что, теперь «шина» — это для всех более-менее понятная ЛВС, через которую IEDы общаются между собой. Но вот вопрос в том, должна ли это быть «полноценная» ЛВС, где под «полноценной» мы будем понимать ЛВС, построенную на базе коммутаторов, или же это должна быть сеть «точка-точка» — вот этот вопрос, по нашим наблюдениям, до сих пор будоражит умы технической общественности.
Рассмотреть этот вопрос комплексно со всех сторон непросто, поэтому в первую очередь мы взглянем на него с позиций надёжности, к которой, традиционно, у апологетов другого («не цифрового», то есть) пути больше всего вопросов. Надо сразу отметить, что приведённые ниже рассуждения не являются плодом гениальной мысли сотрудников компании Теквел и не претендуют на научную новизну, а представляю собой лишь попытку взглянуть на проблему путём более-менее обоснованного численного анализа.
Кроме того, авторы данного поста прекрасно себе отдают отчёт в том, что он наверняка вызовет холивар оживлённую дискуссию у технической общественности, ради чего, собственно, этот пост и пишется, ведь в чатах спорах рождается истина.
Итак, для конкретности возьмём примитивную схему присоединения. Мы понимаем, что в чистом виде таких схем на объектах, где кому-то может прийти в голову применять Sampled Values, не так уж и много (если не сказать, что вообще нет), но в настоящий момент рассмотрение конкретной схемы мостика или 3/2, или прямоугольника – это излишняя детализация. Итак, мы примем, что у нас просто есть одно присоединение РУ, собранного по схеме одиночной [секционированной] шины.
Для начала мы рассмотрим классическую схему РЗА, где есть два комплекта, каждый из которых подключен к своему керну ТТ своими цепями переменного тока. Схематично это показано на первом рисунке.
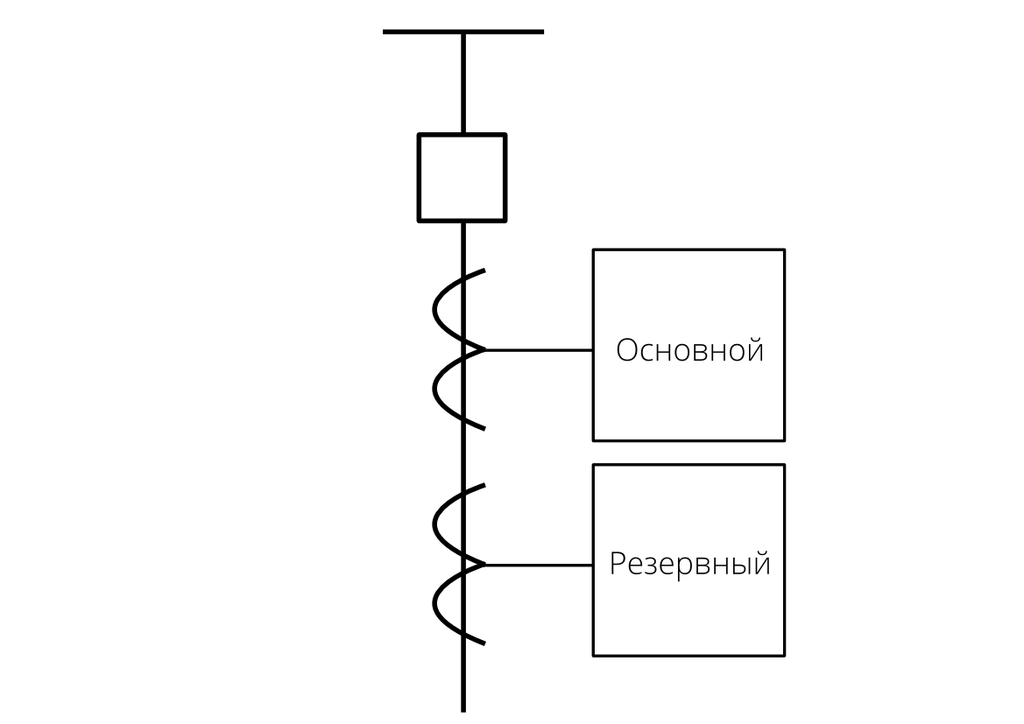
Предположим, что на нашей цифровой подстанции будут установлены не оптические трансформаторы, а обычные объединяющие устройства отдельностоящие (то есть, SAMU, которые мы дальше для простоты будем называть MU). Мы сделаем это просто для конкретности, чтобы не рассматривать варианты на все случаи жизни. Аналогичные рассуждения легко экстраполировать на любое оборудование, с которого принимается SV.
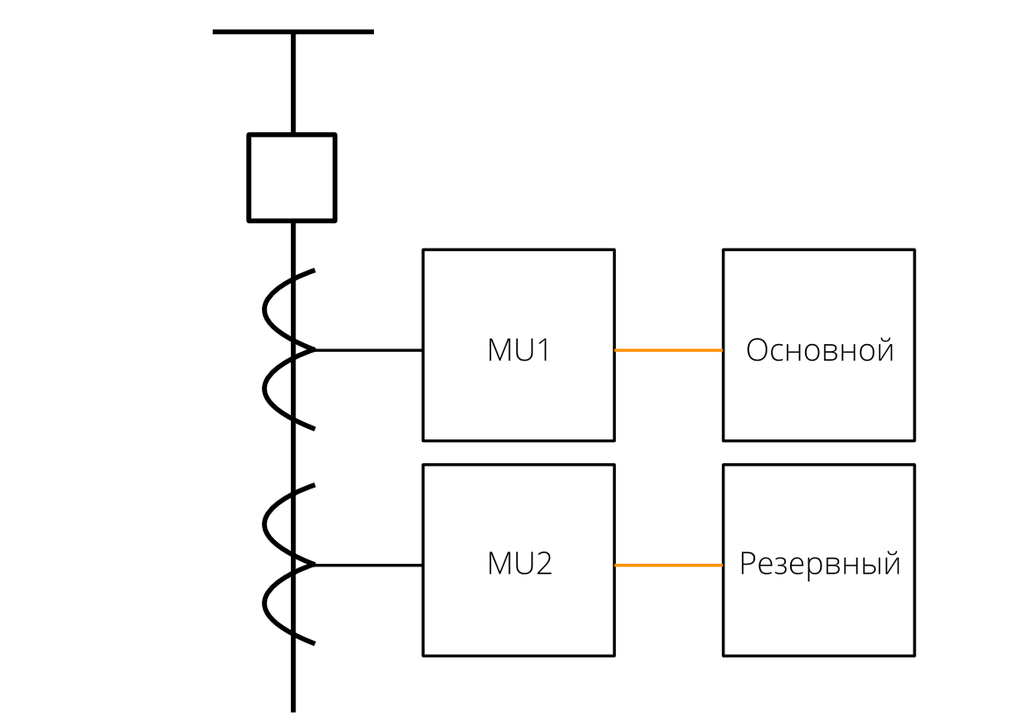
В первом случае мы сделаем всё «в лоб», то есть мы просто возьмём, и поставим MU, подключив к нему РЗА по схеме «точка-точка». Здесь мы опустим вопросы «а куда подключить ДЗШ, ДЗТ и проч.».
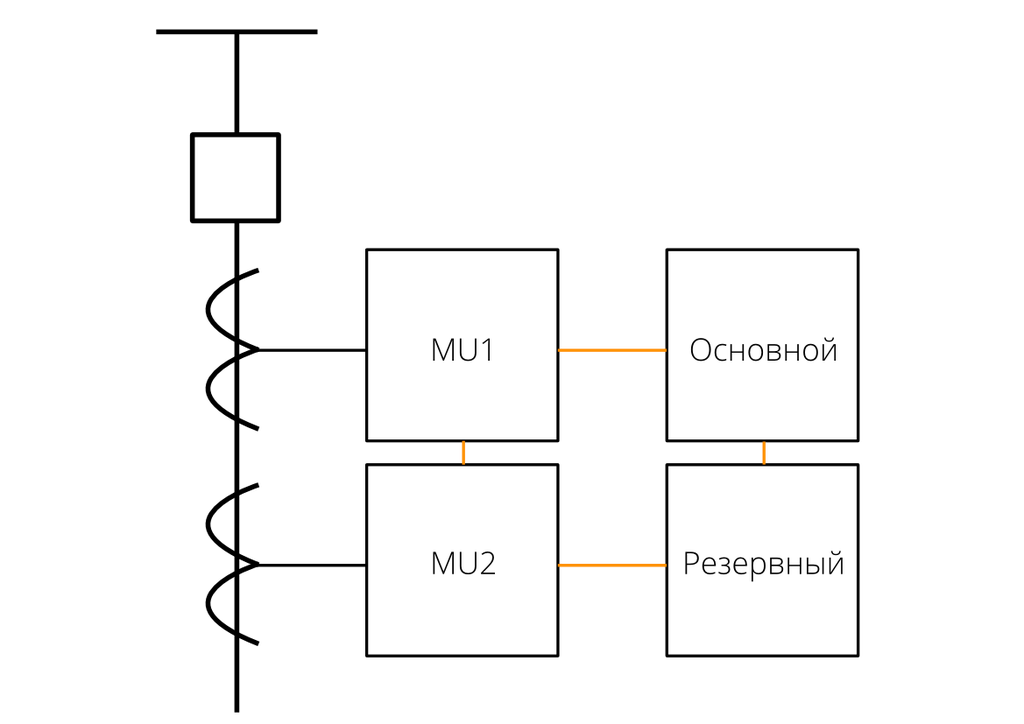
Во втором случае мы сделаем два небольших дополнения к схеме «точка-точка»:
- Положим, что MU и РЗА поддерживают какой-либо из протоколов кольцевого резервирования
- Положим, что каждое устройство РЗА настроено таким образом, что оно принимает потоки SV от обоих MU, в качестве базового использует один из них, но если базовый пропадает, то переключается на использование второго.
В принципе, все рассмотренные допущения, на наш взгляд, не являются невыполнимыми и даже (опять же, НА НАШ ВЗГЛЯД) не должны повлечь существенного увеличения стоимости указанного оборудования.
Так вот, с учётом всего изложенного, схему можно представить так, как показано на третьем рисунке.
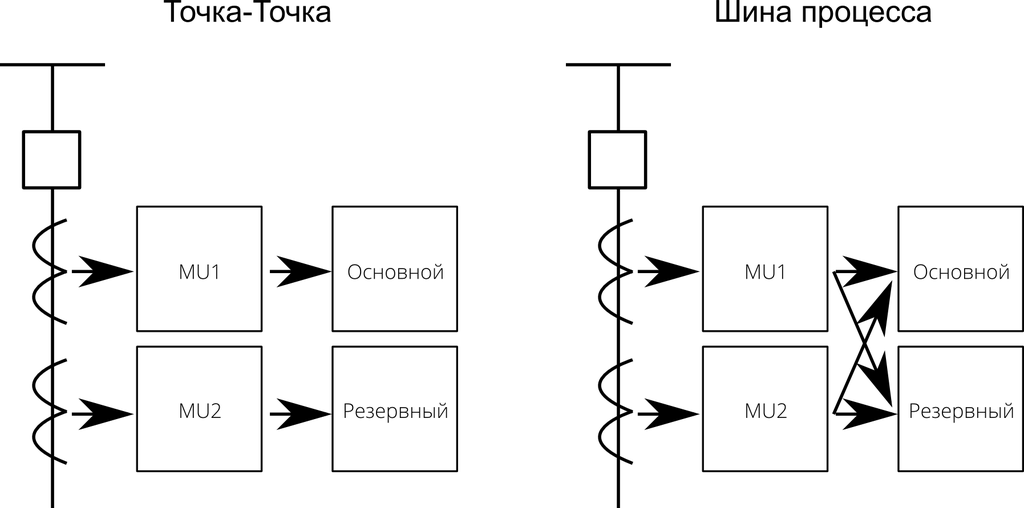
Разницу между представленными вариантами легко показать в схематичном виде. Для первого варианта («Точка-Точка») мы имеем две независимые цепочки, в каждой из которых отказ одного элемента ведёт к отказу цепочки. Во втором варианте (Шина процесса) мы имеем перекрестное соединение на прикладном уровне.
Посмотрим количественно, что даёт такое соединение. В рассматриваемых схемах присутствуют следующие элементы:
- Трансформаторы тока и цепи переменного тока
- MU
- ЛВС (представленные отрезками линий связи)
- Устройства РЗА
Для конкретности примем для всех коэффициент готовности , то есть каждый элемент на представленной схеме имеет такой коэффициент готовности.
Здесь под коэффициентом готовности мы понимаем средний коэффициент готовности на заданном интервале (например, на интервале между техобслуживанием, либо на сроке службы) согласно ГОСТ Р 27.002— 2009. Конкретное уточнение интервала в данном случае не имеет смысла, поскольку вне зависимости от этого интервала, расчёт в обоих случаях ведётся для одного и того же значения.
Перейдём к расчёту. Рассчитывать мы будем коэффициент готовности всей системы РЗА. Проще говоря – вероятность того, что на рассматриваемом интервале времени система будет готова к отключению КЗ.
Для первого случая точка-точка расчётная формула составляется элементарно, поскольку поперечных связей между устройствами нет. То есть сначала можно просто взять одну цепочку и перемножить коэффициенты готовности для неё.
Потом по правилам расчёта вероятности исправного состояния для параллельных цепочек имеем:
Как видно, надёжность «не ахти». До «трёх девяток» не дотягивает. Но это, конечно, не серьезно, так как мы задавались совершенно абстрактным коэффициентом готовности и в конечном счёте нас будет интересовать сравнение полученных величин, а не их абсолютные значения.
Рассмотрим следующий – второй – случай с шиной процесса. Благодаря наличию перекрестных связей между MU и РЗА схема в отношении расчёта надёжности меняется. Теперь схему в смысле надёжности можно представить как цепочку последовательно соединенных эквивалентированных элементов:
- ТТ, цепи переменного тока и MU
- ЛВС
- Устройства РЗА
Здесь мы делаем одно довольно грубое (и, вообще говоря, не совсем корректное) допущение: отказ ЛВС определяется только отказами связей, хотя на самом деле отказ MU или РЗА может быть выражен отказом в нём функционала коммутатора. Однако очевидно, что не все отказы MU и РЗА будут сопровождаться отказом функционала коммутатора, а в связи с этим, данный вид отказа требует более детального рассмотрения.
Результирующий коэффициент готовности будет рассчитывается по стандартной формуле для цепочки последовательных элементов:
Таким образом, можем видеть, что результирующий коэффициент готовности приблизительно на 7% выше, чем в случае с топологией «точка-точка». Как уже отмечалось в примечаниях выше, приведённые расчёты не учитывают некоторых дополнительных возможностей отказа, в частности, наложение отказов функции коммутатора в MU или РЗА в сочетании с отказом ЛВС. Однако, вероятность указанных событий будет в среднем на порядок меньше, чем рассмотренных выше, в связи с чем, они не внесут существенный вклад в результирующую величину коэффициента готовности.
Вывод
На примере рассмотренных случаев можно составить таблицу преимуществ и недостатков рассмотренных топологий.
| Топология | Точка-точка | Шина процесса |
|---|---|---|
| Преимущества | Простая структура и меньшие требования к устройствам | Более высокий коэффициент готовности при схожих затратах на реализацию |
| Недостатки | Меньший коэффициент готовности | Требование к возможности работы в резервированных топологиях ЛВС; Требование к устройство РЗА по приёму двукратного количества потоков SV |
Следует отметить, что получившаяся разница в 7%, конечно же, не может считаться существенной. Вместе с тем уже можно отметить, что наличие такой разницы на столь примитивной топологии может вырасти в ещё большую разницу при условии рассмотрения более сложных систем, где одновременно принимаются измерения с нескольких MU (в том числе, для измерений напряжения). С другой стороны, обосновать применение более сложной (и наверняка более дорогой) топологии единственным аргументом – разницей в надёжности в размере 7% – нам кажется довольно сложным. Так что вопрос ещё требует дополнительного рассмотрения.
last articles



Verification of SCD files for digital substations: requirements and practical experience
18 November 2021